Please find here the project’s standard presentation, key facts and figures, project identity and more general information:
Publicly available project results and abstracts of non-public Deliverables will be available for download:
Slides and presentations from past events, as well as available links to video recordings:
#H2020RTR21 Conference, Brussels – BE | March 29-30, 2022
– L3Pilot Piloting Automated Driving on European Roads (Aria Etemad, Volkswagen)
>> see it on YouTube – HERE
TRB Meeting, Garden Grove – USA | July 18-21, 2022
– Addressing challenges towards the deployment of higher automation (Aria Etemad, Volkswagen)
ITS-World Congress 2022, Los Angeles – USA | September 18-22, 2022
– Addressing challenges towards the deployment of higher automation (Ph. Stehlik, EICT)
– Hi-Drive Methodology (Satu Innamaa, VTT)
– Towards Hi-Drive Operations (Christina Anagnostopoulou, ICCS)
– Databases of Edge Cases – L3Pilot and Hi-Drive Edge Cases (Johannes Hiller, ika)
– International Research Collaboration with Hi-Drive (Jane Lappin, Lappin Consulting)
– Strategic Innovation Promotion Program for ADVs in Japan (Seigo Kuzumaki, SIP-adus)
TRA – Transport Research Arena 2022, Lisbon – PT | November 17, 2022
– Hi-Drive in the context of EU-Programme Synergies (Aria Etemad, Volkswagen)
Live webinar #1 Code of Practice | February 17, 2023
– Part 1: L3Pilot Code of Practice for ADFs (Felix Fahrenkrog, BMW Group)
– Part 2: Hi-Drive Code of Practice for CADFs (Michele Giorelli, APTIV)
Referenced links: >> L3Pilot CoP (edited version) | >> L3Pilot CoP (complete engineering version)
Showcase #1 EUCAD/EUCAR Brussels, Belgium | May 03-05, 2023
Showcase Flyers
– DLR | Teleoperation as a Key Enabler for CAD
– TOYOTA | Urban Automated Driving
– HYUNDAI | V2X as technology enabler
– STELLANTIS | Ground Truth System – GTS
– VTT – Bosch – ICCS | Enabling AD in adverse winter weather
– BMW | Hi-Drive Experiments by BMW
– APTIV | Virtual simulation framework for radar-centric perception
Presentation
– Keynote: Fostering the knowledge of skills (Aria Etemad, Volkswagen)
ITS-European Congress 2023, Lisbon – Portugal | May 22-24, 2023
– Hi-Drive Project Overview (Aria Etemad, Volkswagen)
– Technology Enablers for vehicle automation (Luisa Andreone, CRF | Francesco Bellotti, University Genova)
– Testing performance and reliability of ADFs (Anastasia Bolovinu, ICCS)
– Evaluation plan for assessing the impact of high automation on the user and society (Satu Innamaa, VTT)
– Code of Practice for the Development of Connected ADFs (Michele Giorelli, APTIV)
Live webinar #2 | September 22, 2023
– Artic CAD –Automated Driving challenges in snowy conditions (Matti Kutila, VTT | Topi Miekkala, VTT)
– Supporting Automated Driving through crowd-sourcing based information services (Tobias Müller, Bosch)
– Precise Positioning and localization inside Tunnel Rennsteig (Sanwardhini Pantawane, Valeo DE)
– Tunnels in Germany & challenges towards Automated Driving (Anne Lehan, BASt)
Project related scientific papers and publications:
A list of project related external links (Project partners, references, etc.):
This section is dedicated to the publication of publicly released research data, including Common Data Format (CDF), Open Data, Drone Data, OpenDD…
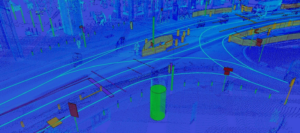
Available here: https://zenodo.org/record/7085090 [External link]
Applications: 3D Object Detection, Map Deviation Detection
Description : 3DHD CityScenes is the most comprehensive, large-scale high-definition (HD) map dataset to date, annotated in the three spatial dimensions of globally referenced, high-density LiDAR point clouds collected in urban domains. Our HD map covers 127 km of road sections of the inner city of Hamburg, Germany including 467 km of individual lanes. In total, our map comprises 266,762 individual items.
The corresponding DevKit is available on GitHub:
https://github.com/volkswagen/3DHD_devkit. [External link]
Privacy policy
This website uses Matomo to analyze traffic and stores a cookie that helps us improve your user experience. The cookie is stored in your browser for 30 days. This data is processed only by us and is not shared with third parties. Please read our privacy policy for more information.